


 Menu
Menu

The Panther-XT is a 1500m rated vehicle with six 500 Volt DC thrusters providing full three-dimensional control and capable of carrying out a wide range of tasks including drill support, pipeline survey, IRM, and salvage.
The Panther-XT is available as a free swimmer or is used in conjunction with a Tether Management System (TMS) and an A Frame Launch and Recovery system (LARS). Surface Equipment is available as either free-standing units or integrated into a control cabin.

A variety of tooling options, six thrusters and a small deck footprint make the Panther-XT a good alternative to costly hydraulic vehicles.

Designed with a range of survey and tooling options.

A light work vehicle proven in demanding conditions during inspection and repair tasks, pipeline survey, salvage and drill support operations.
Surface Power Supply Unit and Surface Control Unit supplied as free standing units or fitted inside an air conditioned control container. An additional tooling power supply option is available.
Surface Equipment includes Hand Control Unit, keyboard and two colour monitors. An additional hand control unit is available for systems fitted with a manipulator skid.
Cabin Junction Box for connections between the surface and subsea. Includes Fibre Optic MUX console with video, and data connections. Additional MUX options available.
Available as a free swimming ROV or in conjunction with a Type 8 Tether Management System (TMS) for depths up to 1500 m.
ROV rated to 1500 m fitted with four horizontal thrusters and two vertical thrusters supplied with 500 Volts DC, two electronics pods, four LED lights, up to four high resolution cameras, a depth sensor and a solid state compass (located inside the main electronics pod) for vehicle auto heading and auto depth. Auto altitude is available as an option when an altimeter is fitted. An additional vertical thruster is available for increased vertical thrust.

Specification | Panther-XT |
Depth Rating (msw) | 1500 |
Dimensions |
|
Length (mm) | 1750 |
Height (mm) | 1217 |
Width (mm) | 1060 |
Weight in air (kg) | 500 |
Payload (kg) | 110 |
Thrust |
|
Forward (kgf) | 180 |
Lateral (kgf) | 125 |
Vertical (kgf) | 110 |
Speed (knots) | 3 |
Power |
|
Power input phases | 3 |
Voltage (VAC) | 380-480 |
Option | 690 |
Frequency (Hz) | 50-60 |
Battery Capacity (kWh) | N/A |
Endurance (km@2kts) | N/A |

Multibeam Sonar options with an integration kit and surface equipment. Ethernet options available for fibre optic vehicles.

Battery-operated, Xenon emergency strobe used to locate vehicle. (ST6K)

Cleaning brush incorporating a heavy duty brush plus an SM7 thruster motor.

Compact cutter capable of cutting 38 mm diameter steel wire rope. Includes an intensifier and requires a 4kW HPU.
Water Jet System for cleaning operations. Requires three-phase, 4.5 kW power supply unit.

Laser options for video survey.

High resolution colour or monochrome cameras fitted to either the front of the vehicle on tilt platform or on bracket at rear of vehicle. (CAM04)
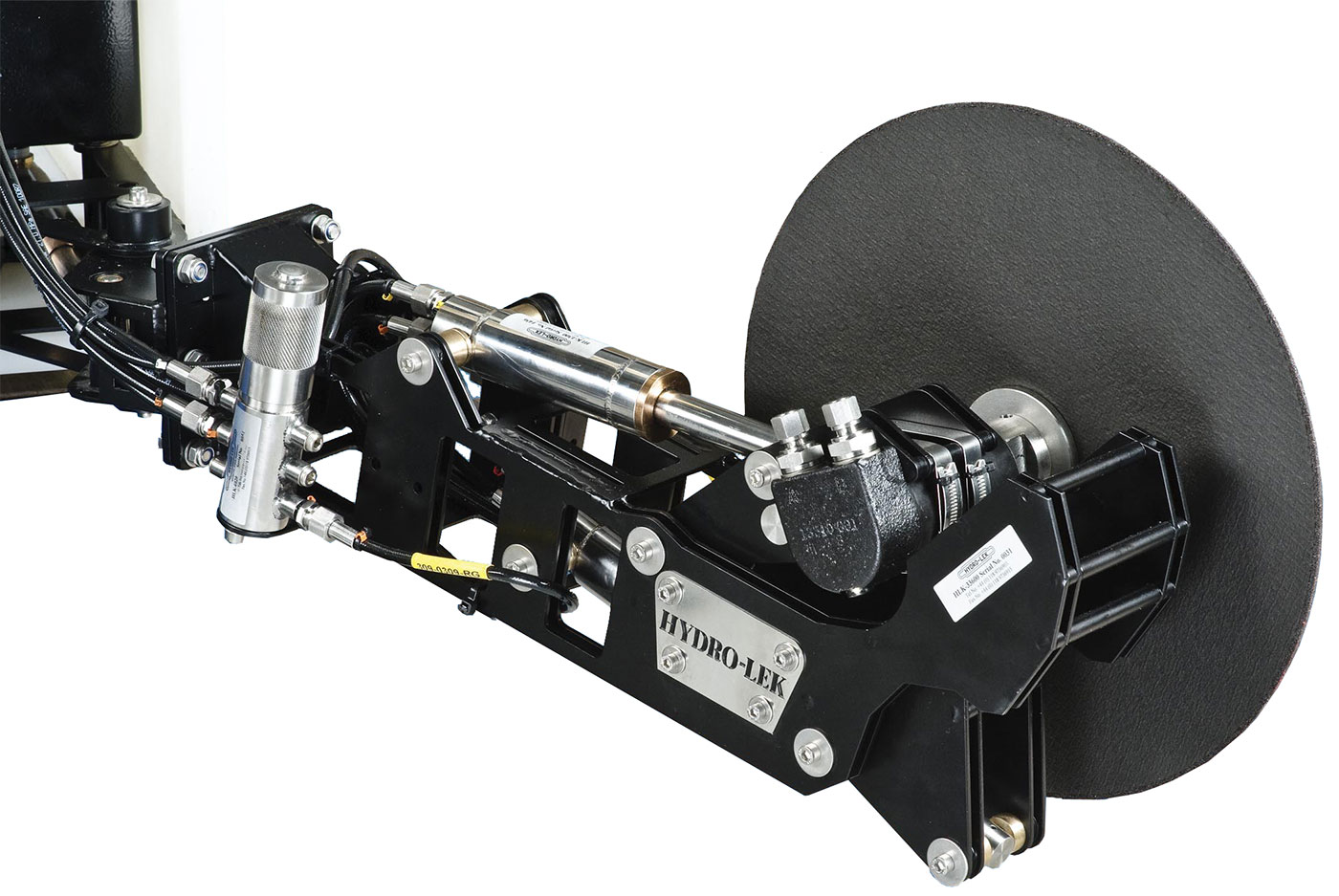
Rotary Cutter used for cutting through hoses and cables up to 4 inches thick. Requires a 4kW HPU.

Additional three-phase power supply unit used to power tooling options.

An additional vertical thruster is available for increased vertical thrust. (SM7)
Control cabin options include video recording unit, video matrix switcher, communications system and high-back pilot seat.
Acoustic tracking system to calculate position of vehicle fitted with an acoustic beacon.

Ultrasonic thickness gauge to determine the level of corrosion present in a structure.

Scanning Sonar options with an integration kit and surface equipment.

Bathymetric system with depth sensor and altimeter. Ethernet options available.

Altimeter used to measure the altitude of vehicle above sea floor. Auto altitude option available. (PA200)

High Definition (HD) camera for vehicle. (OE14-502)

Additional 4kW HPU and control valve used for additional hydraulic tooling options.
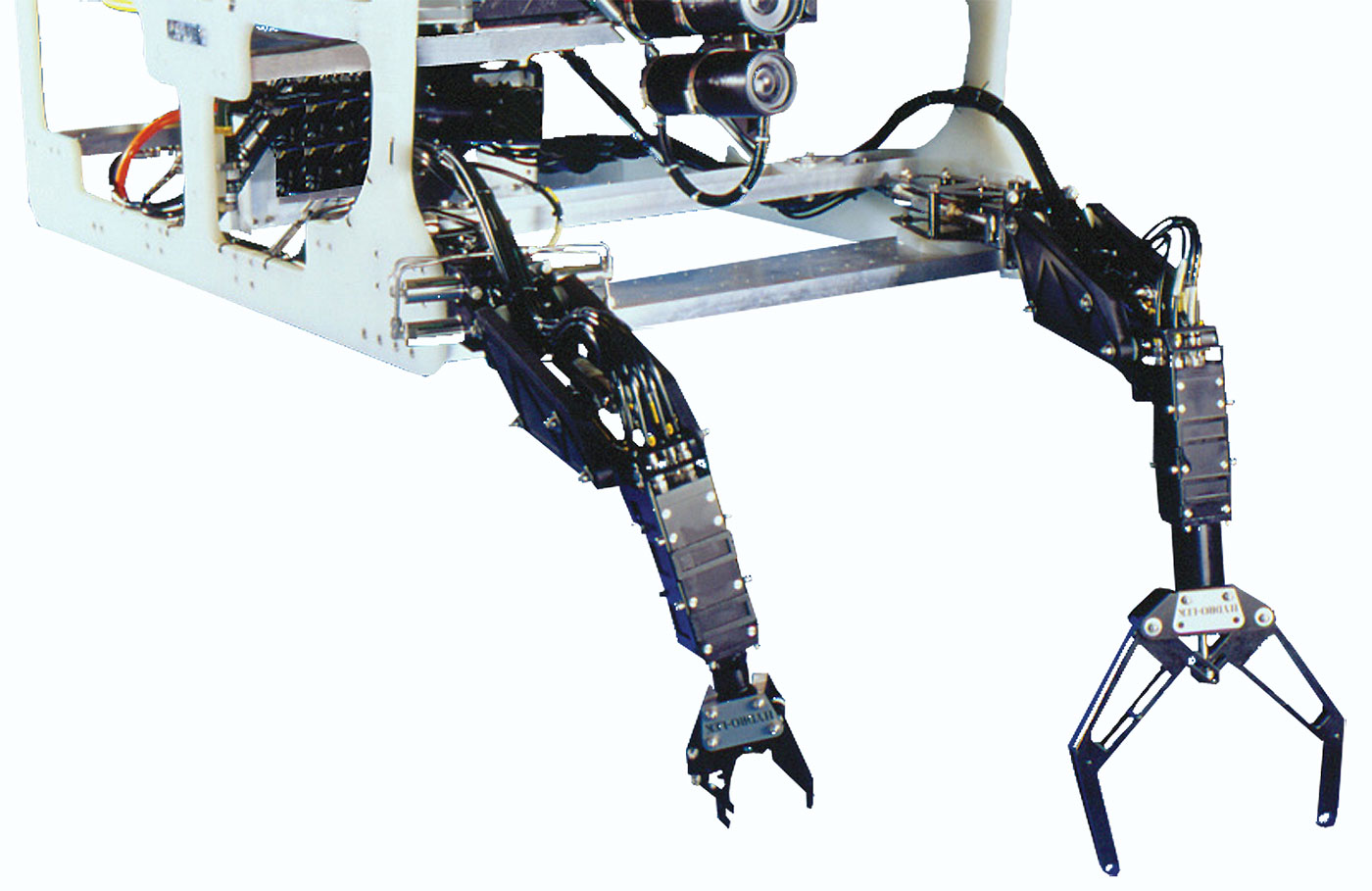
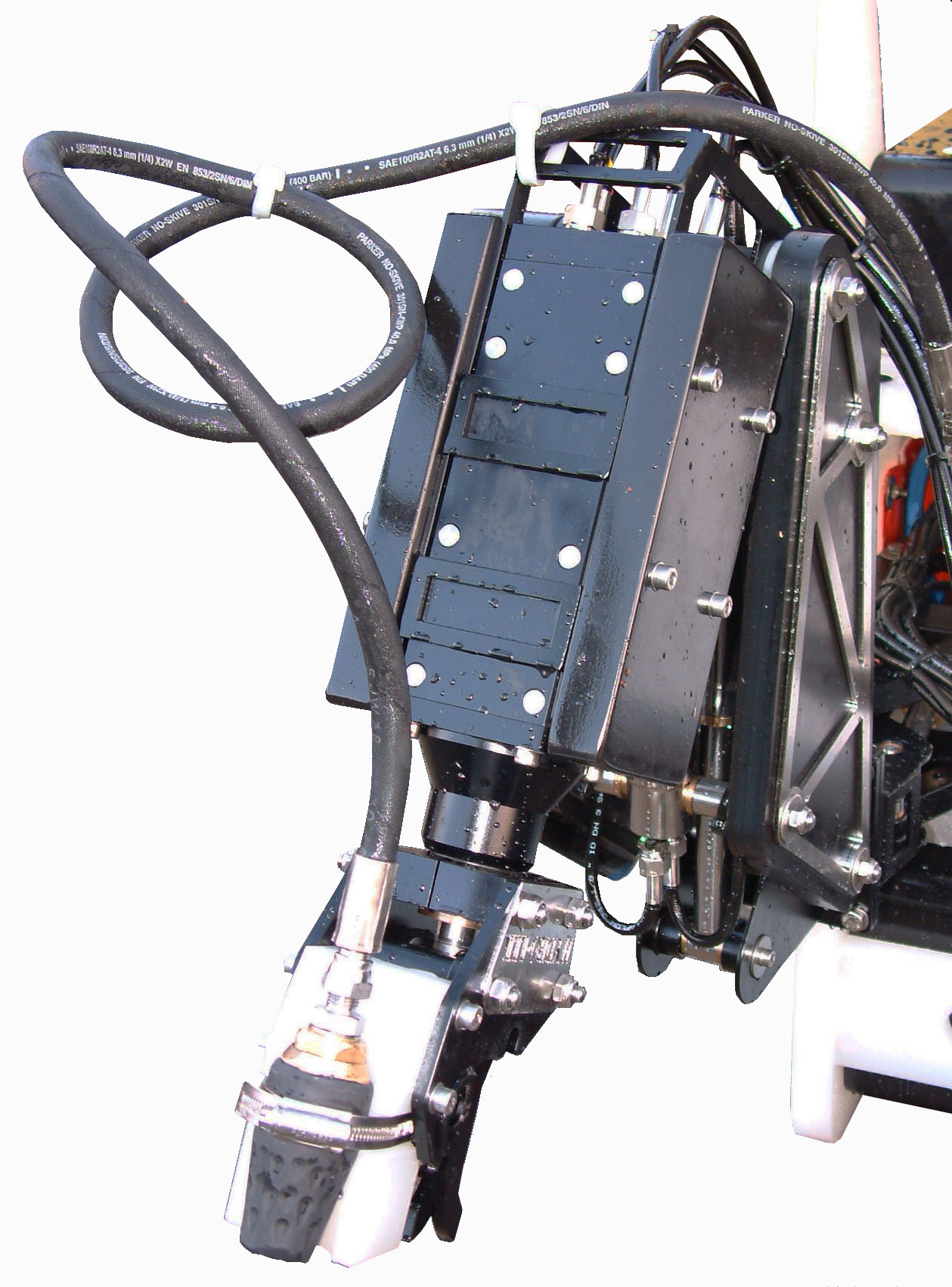
Five and six-function heavy duty manipulator system. Manipulator camera options available.

Cathode Potential Probe with either contact or proximity probe options available.

Tether Management System (TMS) Type 8 with 250 m of fibre optic tether allowing for the deployment of the ROV at working depth and also providing protection.
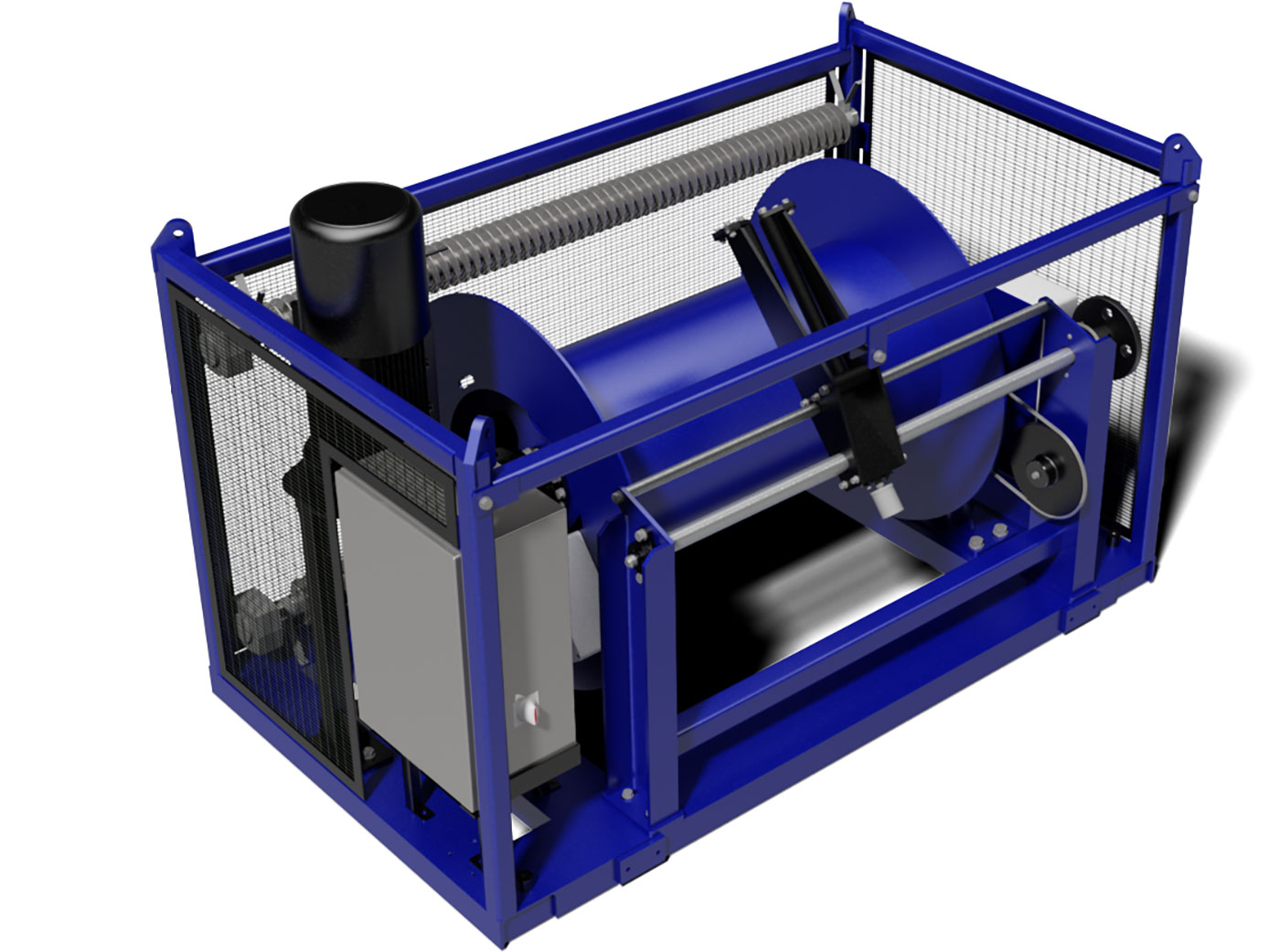
Electric Winch with variable speed and directional control. The winch has a capacity of 1,100m of 14mm diameter umbilical.

Additional cabin options include: 10 ft standalone workshop.
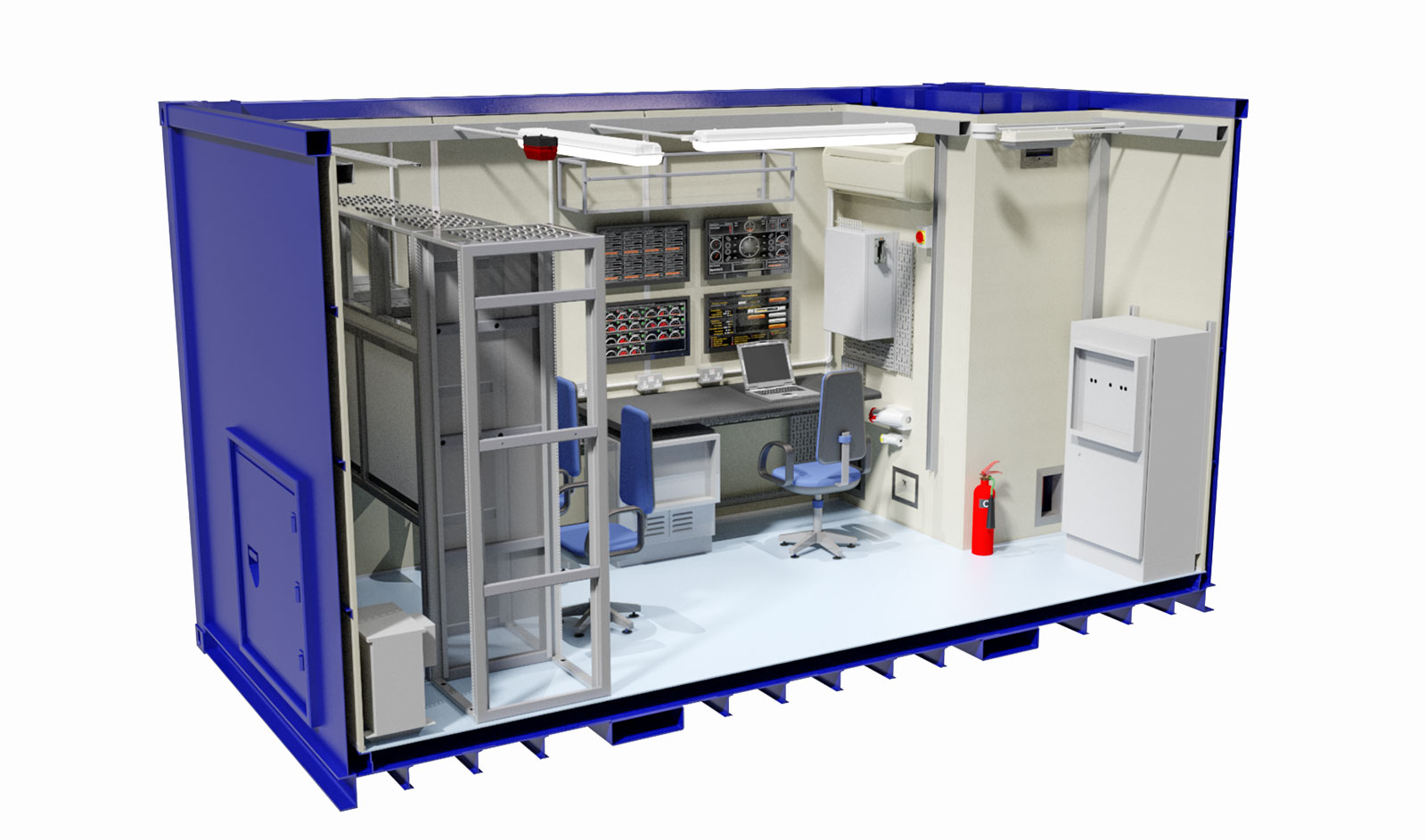
Safe Area Control Cabin (16 ft) fitted with electric power distribution panels and air conditioning. A Zone II upgrade option is available.
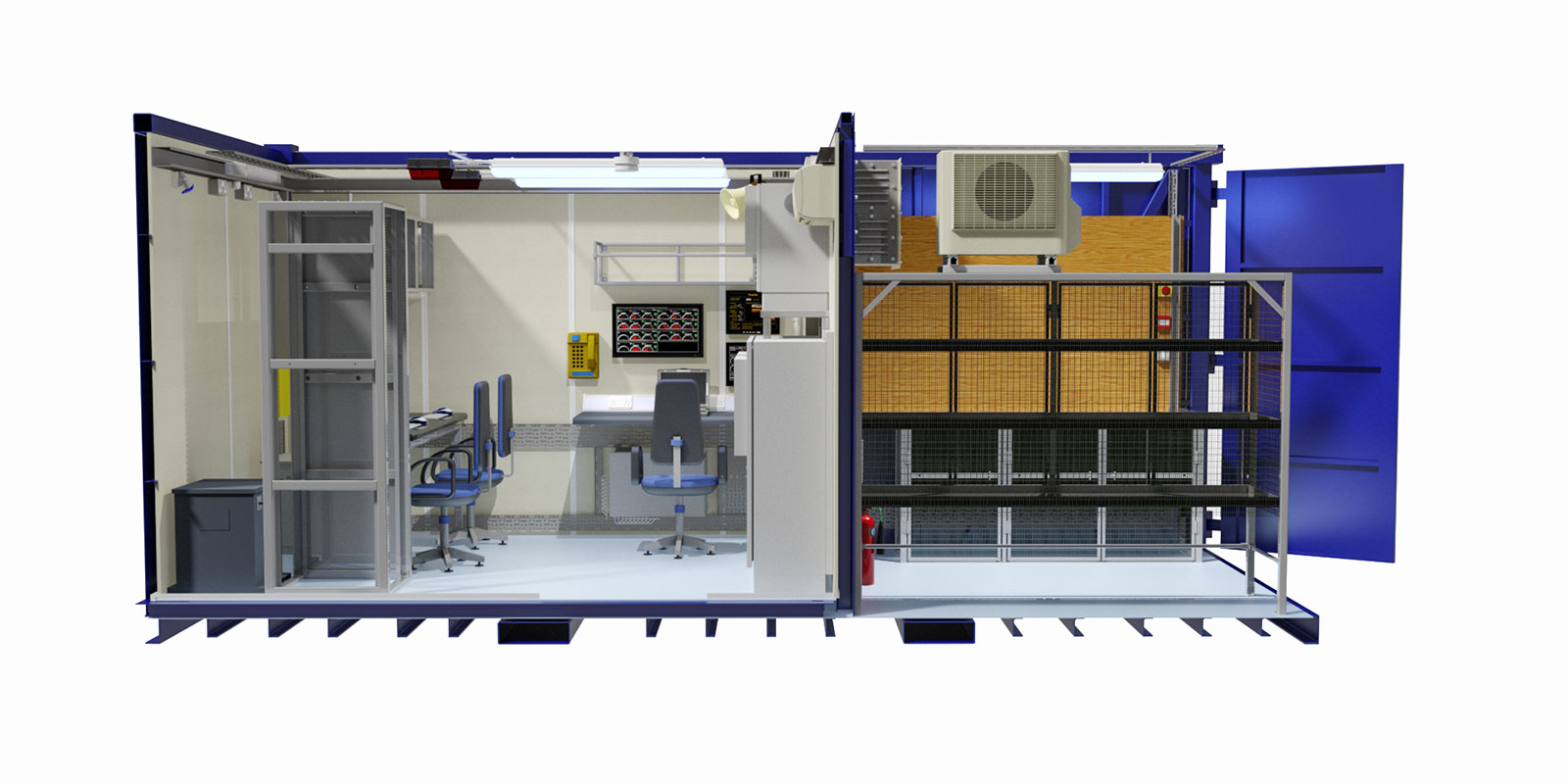
Safe Area 20ft split Control Cabin with a Pilot Control section and a separate high voltage PSU section. Fitted with electric power distribution panels, lighting, air conditioning, heating and 19 inch racks. An optional installed escape hatch is available as is a Zone II upgrade.

A-Frame Safe Area Launch and Recovery System (LARS) with Lock Latch or Snubber options. A Zone II upgrade option is available.
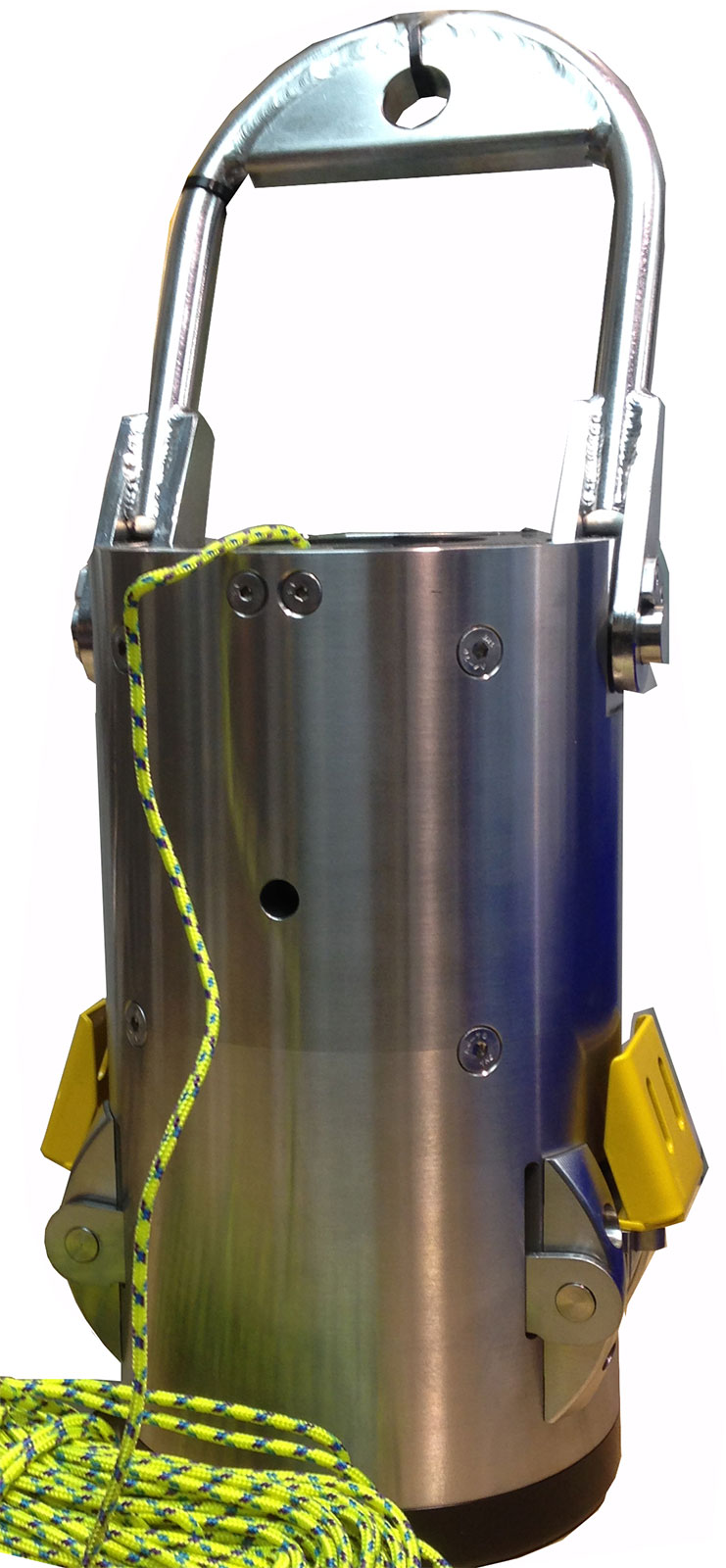
Running Lock Latch system used for launch and recovery to reduce the strain on the umbilical. Includes a latch release line to free the ROV from the lock latch.
For pipeline inspection in the Gulf of Mexico, global maritime, survey and ROV services operator, ACSM, chose an electric Saab Seaeye Panther XT robotic vehicle over other ROV vehicle alternatives.
Read more
The Subsea Services Business Line of Fugro has added six new Saab Seaeye ROV systems to their worldwide ROV fleet in the first half of 2011 in a deal that sees Fugro continue their relationship with Saab Seaeye stretching back to the early 1990s. In addition to the six new ROV systems, Fugro has also taken the opportunity to update three of its earlier generation Saab Seaeye ROV systems to the latest specification and standard.
Read more
Romanian-based subsea services company, Shark SRL has purchased a Saab Seaeye Panther XT electric work ROV for use with their Reson SeaBat 7125 multi-beam sonar system.
Read more

 Twitter
Twitter Linkedin
Linkedin